
| 創澤機器人 |
| CHUANGZE ROBOT |
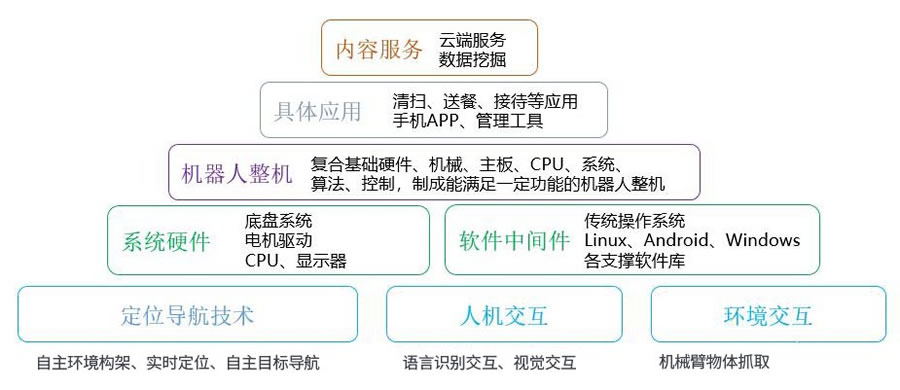
智能機器人也像人一樣具有耳鼻口舌身意!在技術方麵按照通常的理解可分為三大部分四大技術!
三大部分:感知、認知和行為控製
●認知部分分別負責更高層的語義處理,如推理、規劃、記憶學習等。
●行為控製部分專門對機器人的行為進行控製。
四大技術
●導航定位技術
●視覺感知技術
●交互技術
●雲計算、大數據技術。
定位導航技術是實現機器人智能行走的第一步,本質上就是幫助機器人實現自主定位、建圖、路徑規劃及避障等能力。
在這裏就需要涉及到機器人的感知能力,需要借助眼睛(如激光雷達)來幫助機器人完成周圍環境的掃描,配合相應的算法,構建有效的地圖數據,完成運算,實現機器人的自主定位導航。
按照所實現的功能劃分,自主定位導航技術主要包含了以下內容:
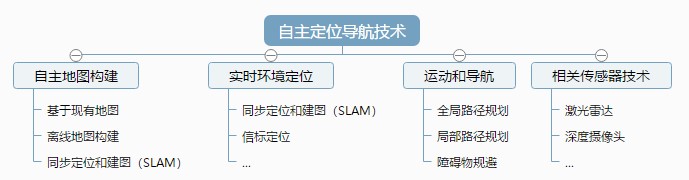
在實際工作中,每個部分都是緊密相連的,下圖展示的是一個典型自主定位導航係統內部各組件的框架:

在實現機器人定位導航技術中,目前主要涉及到>激光SLAM及視覺SLAM ,激光SLAM主要采用2D或3D激光雷達,但應用於機器人上主要以2D激光雷達為主,通過激光雷達可實時采集周圍物體的環境信息,對采集到的物體信息呈現出一係列分散的、具有準確角度和距離的點雲數據,通過激光SLAM係統對不同時刻的兩片點雲數據進行匹配與比對,計算激光雷達相對運動的距離和姿態的改變,也就完成了對機器人本身的定位。
而視覺SLAM方案目前主要有兩種實現路徑,一種是基於RGBD的深度攝像機,比如Kinect,還有一種就是基於單目、雙目或者魚眼攝像頭。基於深度攝像機的視覺SLAM,與激光SLAM類似,也是通過收集到的點雲數據,來計算障礙物的距離。基於單目、魚眼相機的視覺SLAM方案,主要是利用多幀圖像來估計自身的位姿變化,再通過累計位姿變化來計算距離物體的距離,並進行定位與地圖構建。
近年來,由於視覺SLAM受環境光限製較多,無法在暗處工作,目前仍處於研發和應用拓展及產品逐漸落地階段。而激光SLAM憑借穩定性高、不受光線影響等優勢,再加上激光雷達成本的逐漸下降,被認為是目前最具優勢的定位導航方案。
思嵐科技作為國內最早出現在機器人定位導航技術賽道的企業之一,在激光SLAM技術中已有領先優勢,經過多年的技術沉澱,思嵐科技自主研發的定位導航方案已輻射於亞歐美洲等20多個國家和地區,擁有超過2000家企業用戶及個人用戶累計10萬+,作為全球最早從事機器人自主定位導航技術的企業,目前思嵐科技市場占有率高達70%以上,其成熟的機器人自主定位導航方案已應用於微軟、殼牌、優必選、科大訊飛、軟銀等知名企業服務機器人項目中。
據了解,思嵐科技機器人定位導航方案主要由高性能激光雷達RPLIDAR與定位導航控製核心SLAMWARE core構成,具有家用版及商用版之分,家用版測距範圍為12米,而商用版則可達到25米甚至是40米。該導航套裝,可幫助機器人在未知環境中實時提供定位、自主構建最高達5cm分辨率的環境地圖,同時采用D*動態即時路徑規劃算法,機器人可自動完成路徑規劃,在陌生環境中行動自如,並躲避動態障礙物。
除此之外,為了幫助企業快速實現機器人的開發,以最快速度搶占市場先機,思嵐科技還推出了通用型服務機器人開發平台,其內置高性能SLAMWARE自主定位導航係統,不僅為機器人提供了最基本的自主行走能力,還支持虛擬牆和虛擬軌道、自主返回充電、第三方應用拓展及樓層建圖導航,自動電梯控製等多種功能。用戶可根據實際需要搭載不同應用,無需外部環境調整及人為編程設置,可適用於商場、醫院、餐廳、咖啡廳等各大服務場所。機器人開發平台的出現,使得企業可大量降低研發成本,將更多的精力投入到機器人上層應用研發中。
在實現機器人的自主定位導航中,未來多傳感器融合將是大勢所趨,其中包括激光雷達、超聲波、防跌落、防碰撞及深度攝像頭等傳感器,思嵐科技的機器人開發平台就基於了多傳感器融合技術,使其產生更全麵、可靠的信息,精準反映被檢測物體的特性,讓機器人實現更智能的行走。
 |
|
 |
| 機器人招商Disinfection Robot機器人公司機器人應用智能醫療物聯網機器人排名機器人企業機器人政策教育機器人迎賓機器人機器人開發獨角獸消毒機器人品牌消毒機器人合理用藥地圖 |


