電機驅動是利用電動機產生的力或力矩,直接或經過減速機構驅動工業機械手,以獲得所需的位置、速度、加速度。電機驅動是技術較為成熟、應用廣泛的一種驅動方式,為大多 數靈巧手所采用。
電機驅動的靈巧手的驅動形式可以分為旋轉型驅動和直線型驅動。
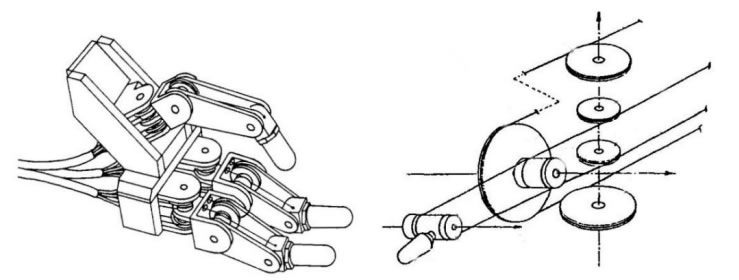
采用旋轉型驅動的靈巧手以 Stanford/JPL 手為代表,其驅動係統由直流電機和齒輪 減速機構組成,因而體積較大,驅動係統隻能放在手掌部位,通過腱進行手指關節的 遠距離驅動。
近年來,微型驅動器和減速器的發展為手指驅動係統的微型化和集成化創造了條件。 例如,德國的 DLR 靈巧手采用直線型驅動器來驅動關節,其直線驅動器將旋轉電機、 旋轉直線轉換結構和減速機都集成在靈巧手內部。該靈巧手采用了模塊化的設計思想, 由四根完全相同的手指組成,每根手指有 4 個關節,3 個自由度,末端的 2 個關節仿 照人手設計成 1:1 的耦合運動。
混合置式靈巧手將一部分驅動器放在手臂,既保證了驅動力,也降低了靈巧手本體的體積, 使得靈巧手更加擬人化
驅動器內置式靈巧手各關節具有較好的剛性,更利於傳感器的直接測量,且模塊化設計利於更換維護;整手尺寸較大,關節靈活度下降
靈巧手的外觀設計更加擬人化,手指本體更加纖細;可以采用更大的驅動電機,從而增大手指的輸出力;驅動器與手本體之間距離遠增加了控製器設計的難度
第一階段是從 20 世紀 70 年代—20 世紀 90 年代,典型代表是日本的 Okada、美國的 Stanford/JPL 和 Utah/MIT;第二階段是從 20 世紀 90 年代到 2010 年
靈巧手是機器人操作和動作執行的末端工具,滿足兩個條件:指關節運動時能使物體產生任意運動,指關節固定時能完全限製物體的運動,定義靈巧手是指數≥3,自由度≥9 的末端執行器
特斯拉公布了 6 種規格的執行器,旋轉執行器采用諧波減速器+電機的方案,線性執行器采用絲杠+電機的方案,對於手掌關節,其采用了空心杯電機+蝸輪蝸杆的結構
人形機器人有更強的柔性化水平,更好的環境感知能力和判斷能力,首要需要解決的問題是如何實現像人一樣去運動,能夠兼顧可靠性
28個執行器分別為肩關節(單側三自由度旋轉關節)6個,肘關節(單側直線關節)2個,腕部關節(單側2個直線+1個旋轉)6個,腰部(二自由度旋轉關節)2個
無框力矩電機沒有外殼,可以提供更大的設備空 間,中間是中空形式的,便於走線;在設計中,可以使整個機器體積更小,因此可以提供更大的功率密度比
型伺服驅動器有三種類型,分別為常規伺服驅動器,SEA 伺服驅動器,本體伺服驅動器;主要由力矩電機,諧波減速器,電機編碼器,輸出編碼器,驅動板,製動器組成
控製係統根據指令及傳感信息,向驅動係統發出指令,控製其完成規定的運動,控製係統主要由控製器(硬件)和控製算法(軟件)組成
電機驅動控製手段先進,速度反饋容易,絕大部分機器人使用電機驅動;液壓驅動體積小重量輕,是機器人Atlas使用的驅動方案;氣動驅動安全性高,應用於仿生機器人等





