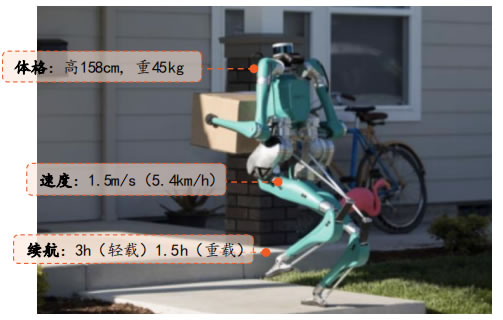
Agility Robotics是一家致力於雙足機器人研發的初創公司。Agility Robotics 2015年成立於美國,部分創始團隊和技術成果 脫胎於俄勒岡州立大學的動態機器人實驗室。Agility Robotics致力於研發和製造雙足機器人,並將其在商業環境中應用。 2017年,Agility Robotics推出了雙足機器人Cassie,它沒有上半身,隻有胯部和兩條類似鴕鳥的腿。2019年,Agility推出了 人形機器人Digit,在Cassie的基礎上加上了軀幹、手臂,並增加了更多計算能力。
Digit從功能出發進行設計,有望在物流領域實現應用。不同於波士頓動力Atlas對運動能力的冗餘設計,Agility致力於將機 器人投入實際應用。Digit主要為物流場景設計,可以拿起和堆疊18kg重的箱子,進行移動包裹、卸貨等工作, “最後一 公裏”配送功能也正在開發當中。Agility公司創始人認為,與小車相比,雙足機器人在物流領域會展現出更大的靈活性。
複雜地形自適應平穩快速行走 U-SLAM視覺導航自主路徑規劃 手眼協調操作精準靈活服務 多模態情感交互仿人共情表達 動態足腿控製自平衡抗幹擾
機器人HUBO以直腿態行走,更接近人的步態;全身有34個自由度,左右手分別有3,4個手指,可以操縱方向盤,攀爬梯子等,超過Atlas贏得了DARPA機器人挑戰賽冠軍
波士頓動力公司致力於研發具有靈活運動能力的多足機器人,主要包括四足機器狗Spot(用於工業巡檢等場景)和帶機械臂的移動機器人Stretch
仿人機器人的機械構造,驅動和控製的複雜程度都遠高於現有的機器人;實現一定程度的認知和決策智能,尚需要人工智能軟硬件(大腦)的高度發展
頭部使用三顆Autopilot 攝像頭作為感知係統,Left/RightPillarCamera左肩/右肩攝像頭和FisheyeCamera 中央魚眼攝像頭,提供大於180度體前場景覆蓋,
CyberOne機器人搭載的Mi-Sense深度視覺模組,產品在測量範圍內精度高達1%,滿足激光安全 Class1 標準,擁有完整的三維空間感知能力
WALKERX采用基於多目視覺傳感器的三維立體視覺定位,采 Coarse-to-fine的多層規劃算法,實現動態場景下全局最優路徑自主導航
定位功能主要應用於加工設備工具端的路徑引導;物流標簽讀取和字符識別是識別功能最直接的服務對象;測量功能主要應用於對目標物體的高速 高精測量
沂南網格化App是沂南縣社會治理信息平台的手機應用,可以為食品藥品監管搭建新模式,調動業委會,物業公司,小區網格員,街巷網格員等參與食品藥品安全治理
PLC控製器用於圓周運動或直線運動的控製;嵌入式控製器涵蓋從簡單到複雜的各種運用;網絡式控製器與伺服驅動 統的鏈接是采用各類工業總線形式
中國機器視覺技術在工業領域應用較多,產業分布與中國製 造業發達地區的地理位置聯係較緊密,在廣東省、江浙滬等 地區較集中,誕生了多個中國機器視覺產業鏈上中遊龍頭企業
與RV及其他精密減速器相 比,諧波減速器使用的材料,體積及 重量大幅度下降;精度往往不及諧波減速器,一般應用於多關節機器人中機座





