
| 創澤機器人 |
| CHUANGZE ROBOT |
1 : 安裝6路 LED模組
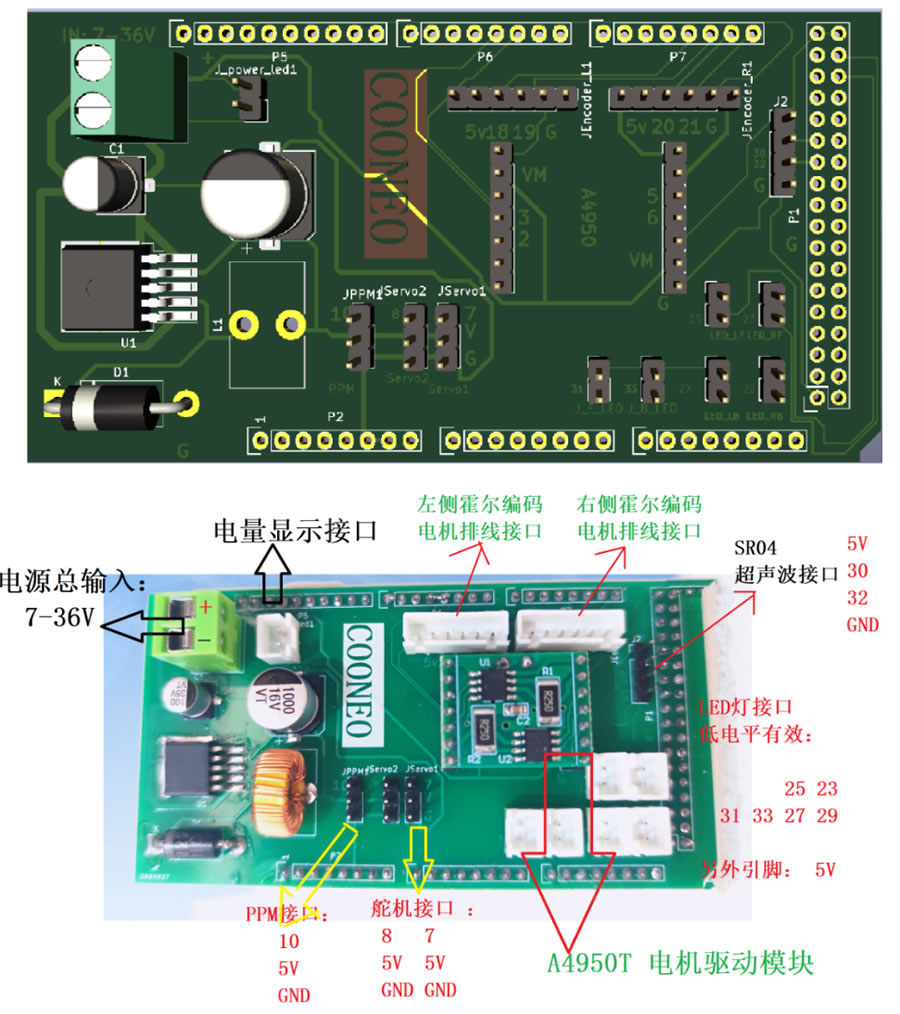
如圖所示,擴展板右下角留有的6路白色LED接口,接口型號是 XH2.54 mm 的2Pin插座,支持杜邦線,也支持型號一致的插頭。每一個插座中,有一個引腳聯通了擴展板板載的LM2596s-5.0A 芯片5V的輸出端,另外一個引腳則聯通Arduino開發板的數字接口,其引腳ID如上圖中所示。(25、23、31......)
2 :LED燈的安裝位置和含義
第一排左測第一:車頭右側 LED 燈電源孔位;
第一排左側第二:車尾右側 LED 燈電源孔位;
第二排左側第一:車頭前大燈 LED 燈排電源孔位;(僅適合阿克曼)
第二排左側第二:車位刹車燈 LED 燈排電源孔位;(僅適合阿克曼)
第二排左側第三:車頭左側 LED 燈電源孔位;
第二排左側第四:車位左側 LED 燈電源孔位;
3 : LED燈閃爍方式的設計
打開 sensors.h 文件,在超聲波程序的下方,有寫關於LED燈組的點亮方式,其中自定義了幾種LED閃爍的方式,並用枚舉方式定義了它們的名字,如下所示:
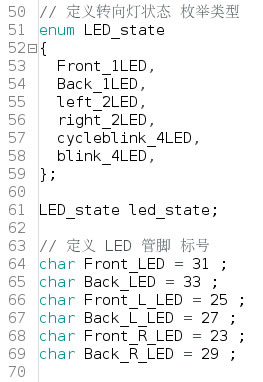
然後,其剩下的就是每一種枚舉類型的點燈代碼。
4 :點燈模組的模式選擇,打開 RobotPIDDriver_a4950T_RC.h 文件,找到 loop() 內部的如下部分代碼:
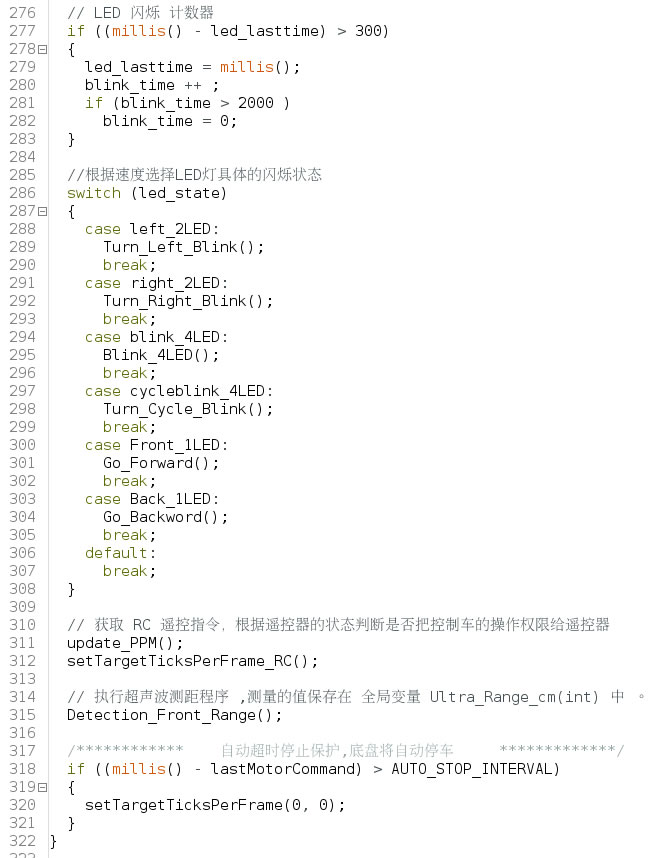
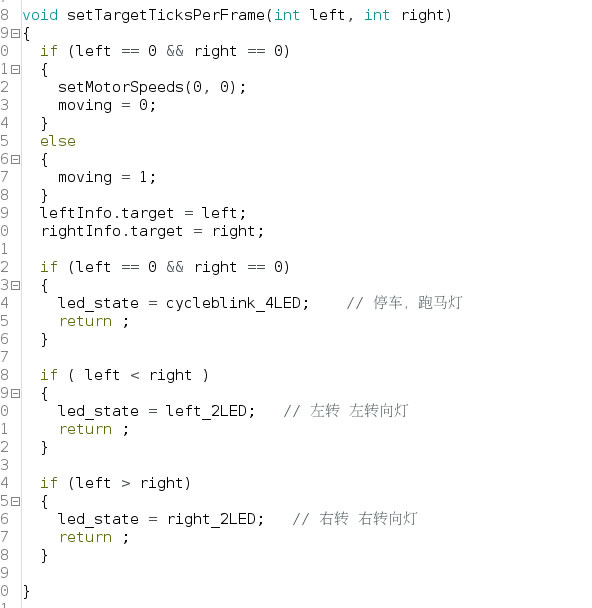
該部分代碼,說明了LED閃爍狀態的切換方式,其切換的依據是依靠左右輪執行的速度差來決定的。如:
V左輪 < V右輪 ,即進入左轉向燈狀態;
V左輪 > V右輪 ,即進入右轉向燈狀態;
V左輪 > 0 , V右輪 > 0 ,前大燈開啟;(僅適合阿克曼)
V左輪 <= 0 , V右輪 <= 0 ,刹車燈開啟;(僅適合阿克曼)
代碼截圖如下:
到這裏,你應該已經調試完畢ROS底盤的Arduino端
 |
| 機器人招商Disinfection Robot機器人公司機器人應用智能醫療物聯網機器人排名機器人企業機器人政策教育機器人迎賓機器人機器人開發獨角獸消毒機器人品牌消毒機器人合理用藥地圖 |



