
| 創澤機器人 |
| CHUANGZE ROBOT |
機器人開發平台關鍵的兩個部分就是:輪子和機架的構型。
機器人開發平台常見8種構型.(a)兩輪差速驅動機器人,(b)car-like robot,(c)四輪驅動機器人,(d)履帶式機器人,(e)麥輪全向平台,(f)全向輪全向平台,(g)四驅四轉機器人,(h)四驅異構機器人.
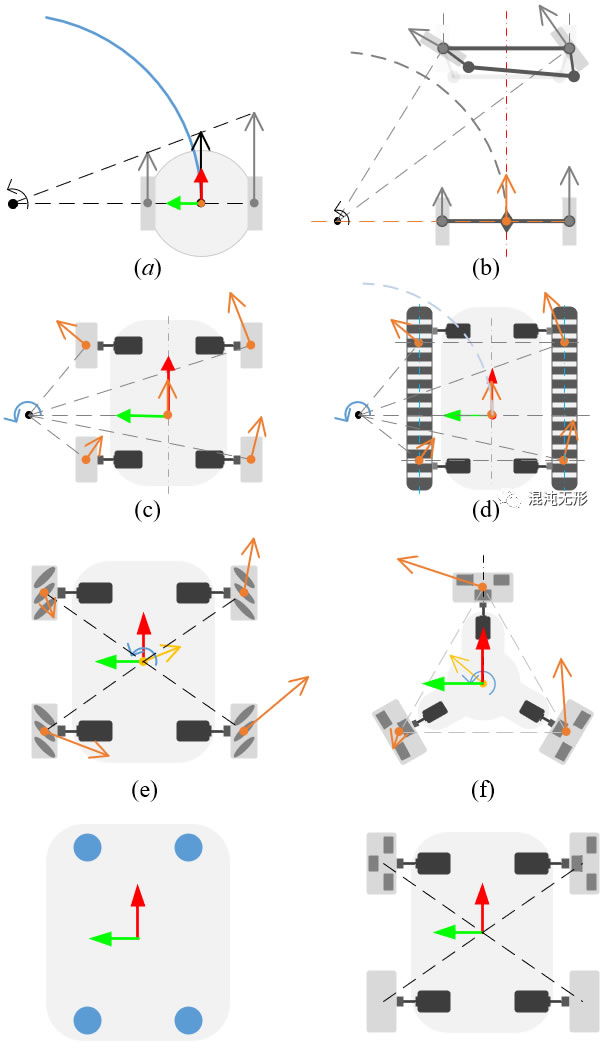
這四類機器人屬於非全向移動機器人,意味著在平麵上運動僅有2個自由度,其運動模型的相似度也較高(可參考《常見移動機器人運動學模型》)。
這兩類相對特殊,采用了麥輪/全向輪,按照一定規律控製輪子轉動,則可以實現全向移動,比起上述非全向移動機器人的靈活性更好,能夠在狹窄的區域運動(可參考《常見移動機器人運動學模型》)。
圖 2.3(g)中的四個藍色原點表示舵輪的位置,上述談到每個舵輪有兩個電機,分別控製輪子滾動和轉向,因此這種類型的機器人也被稱為四驅四轉移動機器人。
四驅四轉機器人相當於有8個電機在控製其運動,因此可輕鬆實現機器人的全向運動。相較於麥輪/全向輪全向平台,舵輪是沒有輥子的,因此負載能力更強,輪子耐磨性更好,且室外非結構化場景的適應能力更強。
當然,也可以將四驅四轉移動機器人的某一對角線上的一對輪子更換為被動萬向輪,通過另一對角線上的一對舵輪驅動運動,這樣就省掉4個電機,也能達到全向運動的效果,隻是驅動功率相對降低了,成本也就降低了。
四驅異構機器人(這是筆者擬定的名字)的兩前輪采用全向輪,兩後輪采用普通橡膠輪,這種構型是之前在文獻閱讀時候偶然看到的,比較新穎。
在《四輪驅動(SSMR)移動機器人運動模型及應用分析》一文中,我們分析兩左(右)側輪的輪速需要保持一致,這樣才能減少橫向滑移帶來的輪胎磨損,而四驅異構機器人則可以消除這種問題。
由於兩前輪是采用的全向輪,當四驅異構機器人轉向時,兩前輪的輥子會被動滾動,從而將滑動摩擦轉化為滾動摩擦,大大降低了摩擦帶來的損耗。
這種類型的機器人還有兩種變化,其一是兩個前全向輪“去掉”電機,變成被動輪,產生的效果和“兩前輪為被動萬向輪”的結構相似,但是有個好處是,四個輪子的半徑是相同的,越障能力比“使用被動萬向輪”更好;其二是兩左(右)側的兩電機合二為一,一側僅使用一個電機,並使用同步帶將電機動力傳送到同側兩輪,這樣就可以僅使用2個電機,實現機器人的直線或圓弧運動。
 |
| 機器人招商Disinfection Robot機器人公司機器人應用智能醫療物聯網機器人排名機器人企業機器人政策教育機器人迎賓機器人機器人開發獨角獸消毒機器人品牌消毒機器人合理用藥地圖 |



