
| 創澤機器人 |
| CHUANGZE ROBOT |
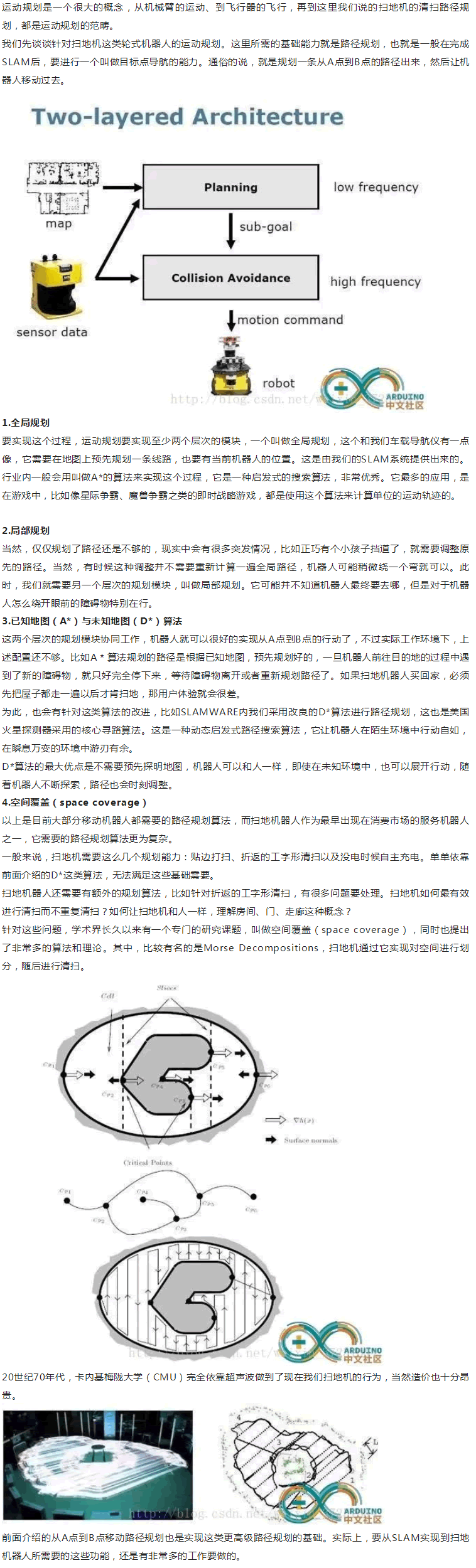
在實現機器人智能導航中,SLAM發揮了重要作用,可幫助機器人實現地圖構建與即時定位,但僅有SLAM是還不夠的,還需要加入路徑規劃和運動控製。在SLAM技術幫助機器人確定自身定位和構建地圖之後,進行一個叫做目標點導航的能力。通俗的說,就是規劃一條從A點到B點的路徑出來,然後讓機器人移動過去。
運動規劃是一個很大的概念,從機械臂的運動、飛行器的飛行,到掃地機的清掃,機器人的移動,其實這些都是屬於運動規劃的範疇。
SLAM+路徑規劃和運動控製=機器人智能導航
運動規劃有全局路徑規劃和局部路徑規劃之分,全局路徑規劃是最上層的運動規劃邏輯,它按照機器人預先記錄的環境地圖並結合機器人當前位姿以及任務目標點的位置,在地圖上找到前往目標點最快捷的路徑。
局部路徑規劃是指當環境出現變化或者上層規劃的路徑不利於機器人實際行走的時候(比如機器人在行走的過程中遇到障礙物),局部路徑規劃將做出微調。
與全局路徑規劃有所區別的是,局部路徑規劃可能並不知道機器人最終要去哪,但是對於機器人怎麼繞開眼前的障礙物特別在行。
這兩個層次的規劃模塊協同工作,機器人就可以很好的實現從A點到B點的智能移動了。
實際上,SLAM算法本身隻是完成了機器人的定位和地圖構建兩件事情,與我們說的導航定位並不是完全等價的。這裏的導航,其實是SLAM算法做不了的。它在業內叫做運動規劃(Motion Planning)。
 |
| 機器人招商Disinfection Robot機器人公司機器人應用智能醫療物聯網機器人排名機器人企業機器人政策教育機器人迎賓機器人機器人開發獨角獸消毒機器人品牌消毒機器人合理用藥地圖 |



