
| 創澤機器人 |
| CHUANGZE ROBOT |
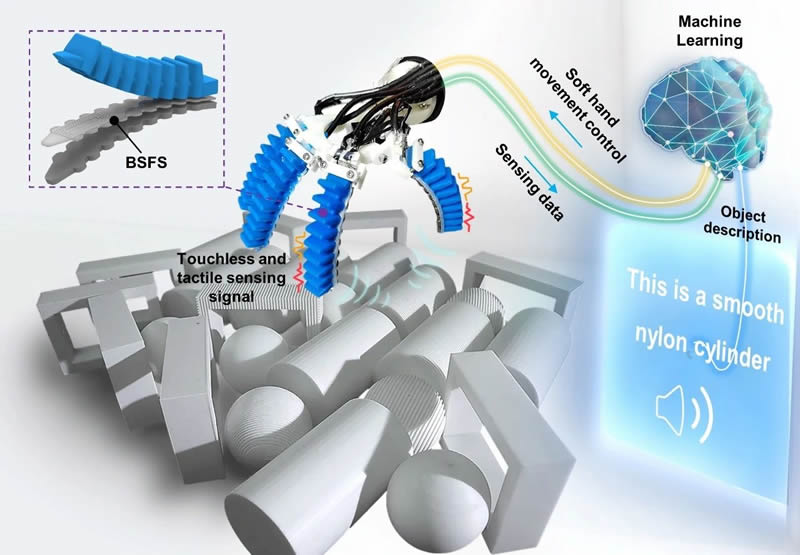
在人類感知世界的過程中,皮膚的多模態感知為我們感受真實的物理世界提供了重要的工具。正如人們用手指觸摸未知的物品,當具有多模態感知能力的機器人手摩擦未知物品時,機器人便能感知到物品的粗糙度;當機器人手隔空拂過位置物品時,它甚至能像X射線和3D掃描儀那樣感知到物品的材質和形狀。因此,能夠感知環境的多模態傳感與擅長交互的軟體機器人的結合必然能擦出火花。
最新一期《先進功能材料》(Advanced Functional Materials)報道了北京航空航天大學仿生軟體機器人實驗室在柔性傳感器與軟體機器人感知領域的最新研究。
該項工作開發了一套智能軟體機器人係統,該係統能夠對物體的物理特性進行感知、描述和分類,可協助機器人解釋物理世界、與物理世界進行交互,為人工智能與世界的交互提供了可能的接口。
當前研究麵臨的問題
軟體機器人具有與生俱來的安全無損特性,在各種實際應用中逐步展現出獨特的優勢。基於壓電、壓阻、電容、摩擦電、和巨磁彈性效應開發的大量柔性傳感器,能夠賦予軟體機器人感知能力,但它們的單一識別模態無法滿足機器人全方麵智能的要求。軟體機器人,特別是軟體機器人手,需要類似於人類手部的多模態信息感知和描述能力。為了擴大軟體機器人的實際應用範圍,開發高性能多模態柔性傳感器和集成機器學習的智能軟體機器人係統勢在必行。
迄今為止,人們已經為開發多模態柔性傳感器做出了許多努力,然而在分離和解耦各種刺激類型的信號方麵仍存在挑戰。雖然研究人員一直致力於開發具有多模態柔性傳感器的智能機器人以感知各種環境信息,然而,目前的智能機器手缺乏全麵的多模態信息感知,尤其是對表麵物理特性的描述能力。這些局限性為軟體機器手進一步感知多模態環境信息和執行精細操作任務造成了阻礙。
結構簡單的雙模態自供電柔性傳感器
研究團隊研發了一種基於摩擦納米發電機和巨磁效應的雙模態自供電柔性傳感器(BSFS)。BSFS結構簡單,由磁彈性導電薄膜和封裝的液態金屬線圈組成,可以在10毫秒的響應時間內精確檢測和解耦接觸和非接觸雙模態信號。
研究團隊在矽膠材料中摻入微磁體和碳納米管,製備具有多孔結構的磁彈性導電薄膜。隨後,使用磁化儀對磁彈性導電薄膜進行磁化,使微磁體重新定向,然後印刷並用矽膠封裝液態線圈。所有組件都是由柔性材料製成的,因此BSFS整體結構柔軟可變形。磁彈性導電薄膜還表現出顯著的磁彈性。

 |
| 機器人底盤Disinfection Robot消毒機器人講解機器人迎賓機器人移動機器人底盤商用機器人智能垃圾站智能服務機器人大屏機器人霧化消毒機器人紫外線消毒機器人消毒機器人價格展廳機器人服務機器人底盤核酸采樣機器人機器人代工廠智能配送機器人噴霧消毒機器人圖書館機器人導引機器人移動消毒機器人導診機器人迎賓接待機器人前台機器人消殺機器人導覽機器人 |


