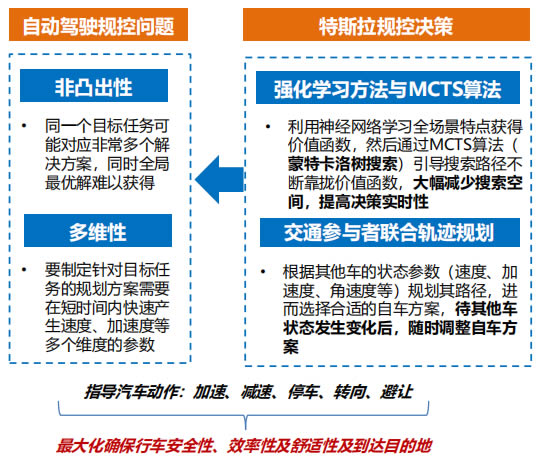
人形機器人決策難度更高:決策層依據感知層獲取的信息進行決策判斷,來控製機器人身體做出動作規劃 並下發指令。特斯拉人形機器人與FSD底層模塊打通,一定程度上算法可複用,但人形機器人需完成人類 各種動作,動作連續複雜、需頻繁的物理交互且操作因果性多,算法難度遠高於自動駕駛。
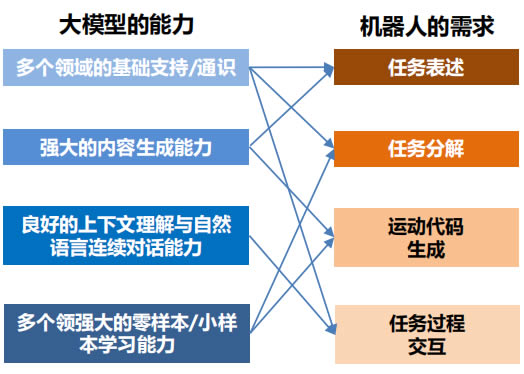
? ChatGPT助力拆解任務:大語言模型擅長推斷語言條件,並利用其代碼編寫能力,拆分任務,給出運動規劃的 目標函數。
? 實時反饋以便調整動作:依據感知係統的反饋,可實時調整動作規劃,並執行
人形機器人進入門檻高,科技巨頭擁有研發實力及軟件基礎,在視覺感知,算法,虛擬仿真等軟件方麵領先優勢明顯,且與原有業務協同效應明顯
人形機器人本質是AI係統落地物理世界的最佳載體,但更核心問題在於是算法對運動能力的控製,包括本體平衡,行走的步態,部抓取等規劃與控製
預測全球25年人形機器人初步商業化,銷量3萬台左右,30年這些領域就滲透率1.5-2%對應存量需求230萬台,新增需求100萬台+,2035年銷量有望突破1000萬台
為人形機器人的成熟也是漸進式,可在細分市場的率先商業化,後逐步成熟轉為通用型機器人 ,由tob轉為toc,進入家政等市場,做人想做但是不能做的工作
硬件難點是靈敏度與承壓能力的協調,關節能力不能匹配運動規劃;軟件難點是訓練不同任務的運動規劃,實時反饋視覺檢測與理解,並對運動規劃做調整
感知模塊包括兩方麵視覺和觸覺,視覺有純視覺路線,也有依靠雷達等多方式融合路線;決策模塊是機器人的大腦,核心是芯片與算法
人形機器人擁有更高級的感知交互係統,包括傳感模塊和軟件方麵,人形機器人比服務機器人更高,靠雙足行走,對減速器負載和電機響應速度要求更高
具身智能與垂直大模型,人形與四足仿生機器人,三維感知模型和多模態信息融合,機器人新型核心零部件與靈巧操作,腦機接口,生肌電一體化與微納機器人
特殊場景服役機器人是指在特定環境或情況下執行任務的機器人,在消防救援,電力勘測,農業,建築,核工業,反恐防暴,國防安全,空間探測等領域具有巨大需求
群體機器人技術的應用領域廣泛,集群智能作為人工智能的分支,將得到越來越多的應用,有望在機器人等領域創造出新的應用和創新
雲服務機器人是指將機器人的核心計算和智能部分部署在雲端服務器,雲端大腦+本地機體”或“雲端服務”機器人將成為規模化推廣與應用的重要模式之一
室內商業服務機器人主要應用於室內環境中的導航服務,商業清潔,餐飲配送,無人售貨,無人餐廳等服務場景;核心技術包括機器視覺,柔順抓取,人機交互,智能決策與控製等






