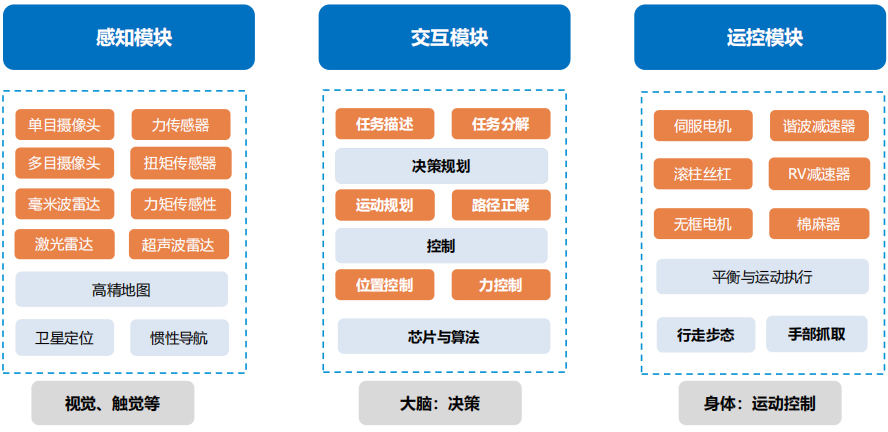
人形機器人構成:三大模塊,軟件與硬件交互
◆ 感知模塊:包括兩方麵視覺和觸覺,視覺有純視覺路線,也有依靠雷達等多方式融合路線,以便躲避障礙、 規劃路線;觸覺主要通過傳感器判斷物體的重量、特性等,以便更好實行動作控製。
◆ 決策模塊:是機器人的大腦,核心是芯片與算法,為輸入的任務進行分解、製定最佳決策規劃,並根據感知 和運控模塊的反饋,實時調整;同時可利用大模型不斷訓練和迭代算法。
◆ 運控模塊:機器人的身體,根據指令,對關節的控製是核心,包括角度、力、速度等控製,難點是保持動態 平衡、行走跳躍奔跑、手部抓取等,電驅動方式下主要由電機、減速器、絲杠、編碼器等構成。
人形機器人擁有更高級的感知交互係統,包括傳感模塊和軟件方麵,人形機器人比服務機器人更高,靠雙足行走,對減速器負載和電機響應速度要求更高
具身智能與垂直大模型,人形與四足仿生機器人,三維感知模型和多模態信息融合,機器人新型核心零部件與靈巧操作,腦機接口,生肌電一體化與微納機器人
特殊場景服役機器人是指在特定環境或情況下執行任務的機器人,在消防救援,電力勘測,農業,建築,核工業,反恐防暴,國防安全,空間探測等領域具有巨大需求
群體機器人技術的應用領域廣泛,集群智能作為人工智能的分支,將得到越來越多的應用,有望在機器人等領域創造出新的應用和創新
雲服務機器人是指將機器人的核心計算和智能部分部署在雲端服務器,雲端大腦+本地機體”或“雲端服務”機器人將成為規模化推廣與應用的重要模式之一
室內商業服務機器人主要應用於室內環境中的導航服務,商業清潔,餐飲配送,無人售貨,無人餐廳等服務場景;核心技術包括機器視覺,柔順抓取,人機交互,智能決策與控製等
康複機器人憑借先進的傳感技術和精確的運動控製;醫療機器人通過結合機器人技術和醫療專業知識,為醫生提供更精確、穩定和精細的手術控製
通過將生物體的神經信息獲取,處理和傳遞的機製與電子技術相結合,創造出更緊密連接人體和機器的交互模式,被認為是未來對抗人體疾病的理想武器之一
視覺,力覺傳感器,高速/高功率的微小型電機/液壓驅動器作為機器人實現智能化,數字化,柔性化的敲門磚,逐漸成為新一代機器人重要核心零部件
三維感知模型與多模態信息融合與具身智能、垂直大模型的協同和融合,將進一步擴大機器人應用範圍;可克服單一傳感器存在的局限性
仿生機器人以模仿生物的運動、行為和外貌,實現更自然、更適應性強的性能。包括四足機器人、人形機器人、仿魚水下機器人、仿生撲翼機器人等
具身智能是指擁有自主感知、交互和行動能力的智能體;核心技術包括:智能體環境感知與建模,智能體自主決策與規劃,人機交互,群控協作,機器學習與強化學習等技術





