人類的進化過程中,伴隨著工具的發展,對人手的靈巧精準操作能力要求也越來越高,這個過程也逐漸改變和進化了大腦結構。而如何能讓機器人像人一樣擁有靈巧雙手,一直也是科學家們追求的目標。
至少從十六世紀末開始,科學和工程界就一直在努力開發類似人手的感覺和運動功能的機械手,其中包括運動功能(抓、握、推、拉、打孔、操作等)和感覺功能(主動和被動地探索表麵的質地、濕度和溫度,以及振動、壓力和力的感覺等),並最終形成社會功能(愛撫、威脅、握手、指指點點、敬禮、玩耍和各種手勢,包括自願和非自願)。盡管人們對手如此著迷,但仍然無法完全理解它們。這也是為什麼機械手仍然是機器人技術中最難的挑戰之一的原因之一。
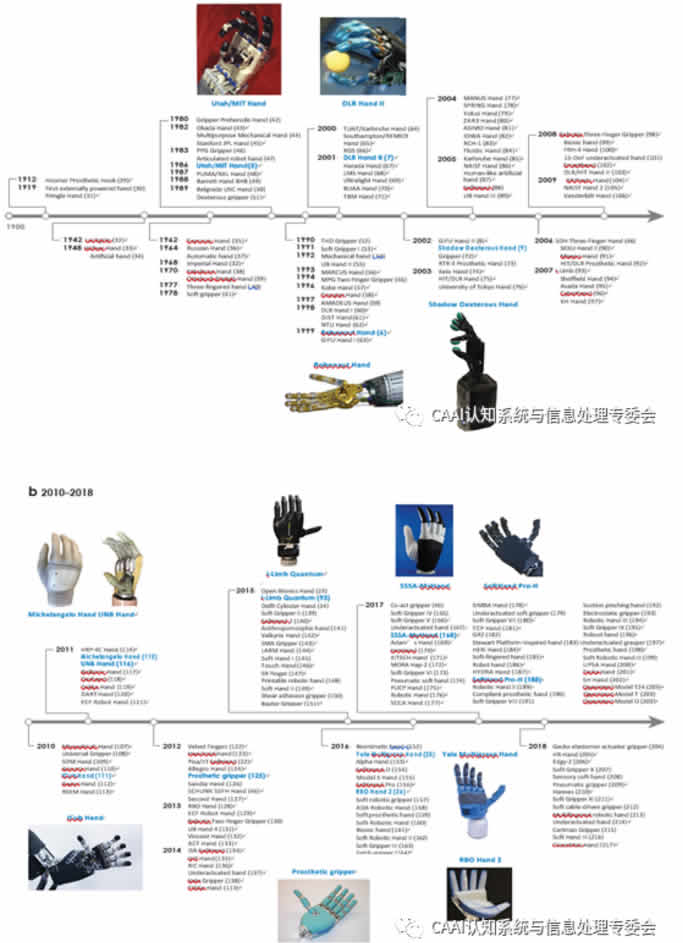
研究人員試圖通過複雜的設計來仿造人類雙手的外觀和靈活性,並集成了許多驅動器和傳感器,例如猶他/MITH、RobonautHand、DLR(Deutsches Zentrum für Luft- undRaumfahrt)Hand II、Gifu Hand II、Shadow Dexterous Hand及清華大學孫富春團隊開發的係列靈巧手等。雖然目前有很多實驗樣機,但在工業機器人、服務機器人甚至假肢方麵,實際應用數量仍然有限。為了增加推廣,近年來已經提出了一些新的方法和解決方案,以開發有效和可靠的靈巧手。事實上,雖然實現了完美的結構和功能擬人化——即不僅在外觀上,而且在動作和功能上與人類的手相似(可能會過於複雜),但近年有趨勢旨在實現穩健的、易於編程的、經濟實用的靈巧手,能夠執行人手操作功能的子集。
回顧近幾年的機器人操作比賽情況,如亞馬遜采摘挑戰賽、DARPA機器人挑戰賽、IROS機器人操作比賽等,大多數複雜的抓取技術都受到了挑戰,這些比賽表明,以簡化設計為目標的方法能帶來顯著的效益。第1屆亞馬遜采摘挑戰賽的獲勝者是一個基於抽吸係統的末端效應器;在DARPA機器人挑戰賽中采用的仿人機器人都沒有完全驅動的擬人手,超過15個團隊(25個參賽者中)使用的是一個隻有3或4個手指的低驅動手;幾次的IROS機器人抓取和操縱比賽中,都是簡易機械手獲取冠軍,反而是複雜多功能的靈巧手在比賽中失利。
在過去的幾十年裏,許多機器人研究小組都專注於極簡主義設計方法。在保留擬人化設計的許多優點的同時,在設計和控製方麵進行原則性的簡化,可以合理地降低係統的複雜度,包括執行器、傳感器和程序代碼的數量。此外,軟體機器人方法也很有用,近年有根據這樣的原理設計的機械手,在抓取的通用性、魯棒性和可靠性方麵取得了很好的效果。
輔助機器人必須能夠在日常生活活動中與環境和人類安全地互動和合作,這意味著手需要小、輕、靈活
醫療服務機器人根據醫院需求分別執行遞送化驗單、藥物等工作,用機器人代替醫護過程中簡單但耗力的流程化工作
在巨大的公共衛生危機麵前,無人機能夠進入疫情嚴重區域自動噴灑消毒劑,降低應急人員被病毒感染的風險
泵和傳感器可以安裝在靠近手臂的機器人底座上進行保護,並實現與機械手遠程連接
Hi3559AV100 Hi3519AV100 Hi3516DV300 Hi3516CV500 昇騰310 旭日 聽濤 思元220 BM1682 BM1880 DeepEye1000 T01
機器人也都成為應急救援搶險的標配,救援機器人發展空間和潛力的爆發,既得益於需求的釋放,也離不開技術突破與商用價值的支撐
智能營銷機器人能夠基於營銷、催收等不同場景配置外呼對話流程,細分場景、描繪精準客戶畫像並對應采取不同話術,成為該銀行智能化轉型的合作廠商。
第四代人工智能配網帶電作業機器人已成功完成雙臂自主、單臂人機協同、單臂輔助自主 3 種人工智能配網帶電作業機器人研發,並全麵投入配網運行
智能客服機器人通過語音識別、自然語言理解、語音合成等技術在不同的業務場景下自動合成企業所需話術,支持智能問答交互
機器人手臂前端裝有叉和勺子,能夠將食物自動夾起,並送到操作者嘴邊,靠著喂食機器,頸部以下癱瘓的病人、肢體不便的老人,也能自行進食
國產關節置換手術機器人又名骨科手術導航定位係統填補了中國在關節置換手術機器人領域的空白
Mars Express Hayabusa Rosetta Phoenix Curiosity Hayabusa 2 OSIRIS-REx Insight Chang’e 5 ExoMars Mars2020 Vega 1/2 Mars Polar Lander MERs





