
| 創澤機器人 |
| CHUANGZE ROBOT |
1、卡扣力信號分析
在工業上,一般分為三種主要的卡扣類型,即懸臂式卡扣組件、環形卡扣組件和扭轉式卡扣組件。它們影響零件設計和卡扣機構,所有類型都是相似的,因為它們基於其中一個柔性部件和第二個高剛度的部件,後者允許將兩個部件插入並鎖定在一起[1]。這兩個部分相互推動,導致柔性部件發生偏轉,直到施加的力超過一定限度,從而導致兩個部件斷裂。它們的區別在於鎖定機構的形狀和產生不同力特征的材料特性。懸臂和環形兩種卡扣組件類型卡扣(圖1)在成功裝配過程中產生的力特征(圖2)如下圖所示。
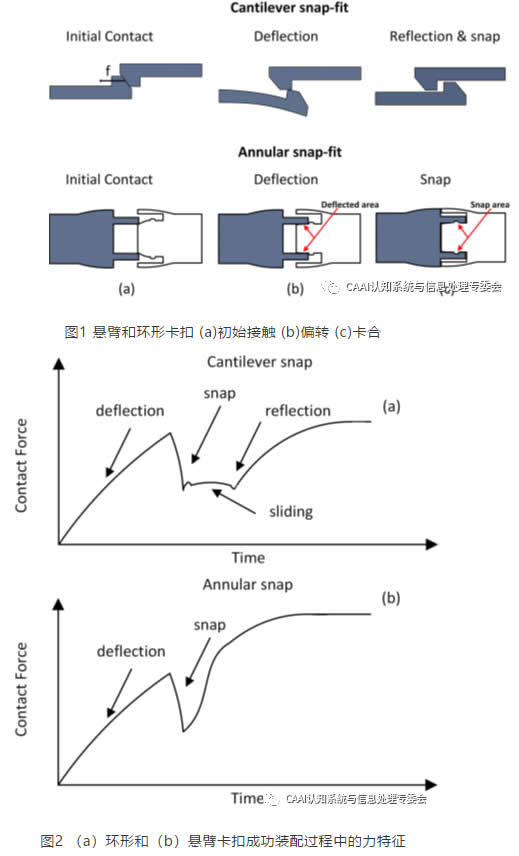
在懸臂卡扣裝配過程中,一旦咬合成功,柔性部件就會偏轉,回到其初始位置對其進行鎖定,隻有拉動柔性部件時才能將這兩個部件分離。對環形卡扣而言,咬合效果由施加在柔性部件上的恒定載荷決定。一旦載荷消失,卡扣就會鬆開。扭轉卡扣在鎖定運動方麵有所不同,兩個部件之間的鎖定運動是旋轉的,但產生的力特征與環形和懸臂相似。
零件在不同的裝配階段產生的作用力可用於描述過程狀態。圖2所示的兩種卡扣的力特征圖具有不同的形狀,可用於及時識別裝配過程的完成情況。在這兩種情況下,物體的偏轉都會產生一個恒定的力,一旦部件的力消失,力就會急劇下降,當兩部分鎖定在一起時,力就會增大。懸臂卡扣在鎖定之前,兩個部件相互滑動,產生一個恒定的摩擦力,該摩擦力由於部件的材質屬性造成的力載荷不同而變化。環形卡扣則不存在滑動。力信號的確切形狀取決於連接部件的機械性能和卡扣類型。環形和懸臂是兩個極端情況,環形卡扣是在恒定的力載荷下,而懸臂卡扣在咬合後載荷消失。
2、機器學習框架
上述分析表明,所有類型的卡扣都會產生相似但不同的裝配力特征,以確認最終的卡扣狀態。目前大多都是通過具體模型分析方法,這需要大量的時間和精力,而且可重用性有限。因此,本文定義了一個機器學習框架,該框架可以識別所有類型的卡扣的力輪廓特征。為了進一步加速這一進程,該框架采用了人機協作的方式來加速實驗過程,生成具有高可變性和準確學習結果的數據集。
隻有構建一個好的訓練和測試集,才能建立一個好的分類器[2]。一個具有統計獨立樣本特征的訓練集並不容易建立,特別是當需要通過機器人實驗產生時。一方麵,生成這兩個程序集類示例可能無法達到使用基於數據的方法的目的,最終的樣本也不可能涵蓋所有情況。另一方麵,人類專家雖然擁有設計和交付大量變化的實驗的知識,但是沒有充分的準備時間。人類有一種與生俱來的可變性,允許構建一個豐富的信息數據集,從而改善機器學習的效果。這一點,加上人參與裝配過程所節省的大量時間,都顯示了人機協作的優勢。上述內容包含在圖3所示的擬議的框架中,其中定義了兩個離散階段:訓練和操作階段。
訓練階段的目的是生成一個能夠實時準確表征力信號的分類器。在這一階段,裝配是協作完成的,其中機器人拿著兩個零件中的一個充當智能傳感器,而人類則作為專家進行手動裝配。在人機協作中,需要一個可以估計或測量的力,而不需要機器人的力傳感器或外部的視覺係統,從而降低了成本和複雜性。論文展示了許多成功和失敗的裝配例子,在各種不同的條件下以不同的速度進行了演示。
3、特征選擇
如圖2所示,卡扣裝配可以概括為在時間序列上力特征的獨特表示。相比之下,不成功的情況可能會有很大的不同,因力不足導致部件錯位產生噪聲信號,導致力上升而不出現明顯的下降。卡扣組件的力信號與零件的材料和鎖定機構有關。由於低頻力信號在其頻譜中顯示的信息很少,因此基於頻率的特征不被考慮。首先選擇了24個特征並進行計算,以進一步評估其識別卡扣裝配的能力。統計的信號特征包括信號能量、偏差度、方差、對數變換、峰度和Willison振幅等。為了避免過度擬合,降低分類器的複雜度,降低對大型訓練集的要求,降低算法的複雜度。由於特征向量的初始尺寸較小,采用了一種窮舉搜索子集的選擇方法,具有較高的性能(精度>0.95)[3]。對於最終的特征選擇,考慮了每個特征的計算複雜度。
4、實驗結果
作者進行了大量的實驗來分析所提出的框架,並對其在兩個階段的效率進行了評估。首先介紹實驗裝置,然後介紹數據采集過程和實驗結果。將7自由度的KUKA LWR4+機械手與三指夾持器Barret BH-8連接,並使用特製夾持器進行評估。選擇了兩組不同的部件(圖4),代表懸臂和環形卡扣組件。在不使用外力傳感器的情況下,通過KUKA力估算機製測量兩個部件之間產生的裝配力。
對於懸臂卡扣,插頭的外接部分安裝在定製的夾鉗上(圖5)。然後母零件被固定在一個穩定的基座上,由機器人進行自主裝配。針對懸臂和環形卡扣裝配都進行了分析,以評估懸臂和環形卡扣裝配的選擇特征。首先,根據訓練階段收集到的數據集,評估所提出的特征和訓練分類器的效果。然後,應用整個框架以提高其整體效率。
收集了四個不同的數據集,其中兩個是通過人機協作收集的,另外兩個是在機器人自主操作時收集的。在每種情況下,都有一半的程序集成功完成裝配,另一半則未能完成裝配。由於零件未對準或所需力不足,會產生兩種不同類型的不成功卡扣裝配的情況。最後,為了測試效果,機器人裝配是在四種不同的平均速度下完成的。
結果表明,在訓練集相對較小的情況下,通過人機協作提取的分類器能夠獲得很好的識別效果。需要注意的是,當整個訓練集用於分類器的訓練時,懸臂和環形卡扣的精度分別達到0.96和0.98。即使是訓練集的一小部分,分類器的性能也非常好,在隻有N=20和N=22個樣本時,分類器的中值達到了0.9。另一個重要的觀察結果是,當訓練集規模增大時,精度異常值幾乎為零,方差顯著下降,顯示了結果統計的顯著性。
運行評估。評估了所提出的框架的整體效能,以實時接收組件裝配信號。結果表明,該方法具有良好的識別性能,與全訓練集相似,準確度、特異性和靈敏度均衡,平均值分別為0.92、0.981和0.86。這些結果表明與整個數據集(N=60)訓練的分類器性能相比,該分類器性能的相對變化較小,分別為7%、0.08%和0.14%。然而,結果會隨著訓練集規模的不同而變化,該訓練集包含很多異常值,類似於圖6所示的分類器的結果。因此,為了克服此類問題,應仔細挑選訓練集,以便在成功和失敗的情況下包含所有信號變化。
轉換評估。這兩種分類器對成功的卡扣裝配信號具有很高的分類精度。對不成功信號的分類精度較低,特征值分別下降到0.673和0.715。該分類器的總體性能用平衡精度來表示,兩種情況下分別為0.836和0.857。盡管分類器具有相對較好的平衡精度,但其特異度非常低,這表示不成功的裝配很容易被識別為成功裝配。
不可見對象的綜合評價。在這一部分中,對所提出的方法用於概括不同對象的整體能力進行了評估。環形卡扣通過人機協作在數據集上訓練產生的分類器,用於識別另一種環形卡扣類型的卡扣組件,在機器人自主操作下進行裝配(圖7)。盡管這兩個對象不同,但它們有相似的咬合機製並生成相似的力配置文件。然而,不可見的物體有更嚴格的力學機製,並且咬合發生在較大的力振幅中,平均咬合值為45 N。在評估過程中,收集了30次咬合力剖麵,每個部件有15個信號(成功和失敗)。該分類器以實時方式對信號進行處理,同時信號在訓練集的管理單元級別上擴展並在200ms時間窗口中采樣。結果表明,對所有成功的裝配部件和265個不成功的卡扣裝配部件中的191個部件進行了正確的分類,平均精度達到0.8604(72.08%特異性)。同時對離線情況(全信號分類)也進行了評估。整體準確度為0.9, 15個裝配失敗信號中的12個(80%特異性)被識別出,所有成功卡扣裝配部件信號都被識別出來。結果表明,該方法無需重新訓練,可以很好地推廣。
該方法與通過具體模型分析方法進行了進一步的比較[4]。該框架是與另一框架在同一個數據集中完成的。這個數據集由33個裝配電連接器的力信號組成,其中9個屬於成功裝配的部件,而其餘的屬於不同類型的錯誤裝配部件。為了評估該框架,將不同類別的不成功的數據合並在一起,將數據集拆分為一個訓練集(60%)和一個測試集(40%)。用基於模型的方法得出四種不同類別的精度,結果平均精度為0.945。因為原始數據集的40%被用於驗證該方法,所以無法進行絕對公平的比較,但結果顯示效果相對較好。
5、結論
本文提出了一種基於機器學習的快速裝配的框架。該框架在兩種不同的卡扣裝配下進行了測試,顯示出較高的識別精度(高達0.99)。通過人機協作訓練產生了良好的學習數據集,成功和失敗案例的可變性都很高。該特征集對不同的對象中進行了測試,顯示它在不同的卡扣裝配類型中的能力。隻要對數據集進行仔細的采樣,即使是很小的N=20個樣本的訓練集,分類器的性能也能表現出良好的效果,可達精度>0.9。同時與基於模型的方法進行了比較,結果表明了該方法的顯著優異性。該框架未來將在更多類型的卡扣裝配中進一步驗證。
參考文獻
[1] J. Ji, K.-M. Lee,and S. Zhang, “Cantilever snap-fit performance analysis for haptic evaluation,”J. Mech. Des., vol. 133, no. 12, 2011, Art. no. 121004.
[2] C. Beleites, U.Neugebauer, T. Bocklitz, C. Krafft, and J. Popp, “Sample size planning forclassification models,” Anal. Chim. Acta, vol. 760, pp. 25–33, Jan.2013.
[3] I. Guyon and A.Elisseeff, “An introduction to variable and feature selection,” J. Mach.Learn. Res., vol. 3, pp. 1157–1182, Jan. 2003.
[4] J. Huang, Y.Wang, and T. Fukuda, “Set-membership-based fault detection and isolation forrobotic assembly of electrical connectors,” IEEE Trans. Autom. Sci. Eng., vol.15, no. 1, pp. 160–171, Jan. 2018. [Online]. Available: http://ieeexplore.ieee.org/document/7572012/
 |
| 機器人招商Disinfection Robot機器人公司機器人應用智能醫療物聯網機器人排名機器人企業機器人政策教育機器人迎賓機器人機器人開發獨角獸消毒機器人品牌消毒機器人合理用藥地圖 |


