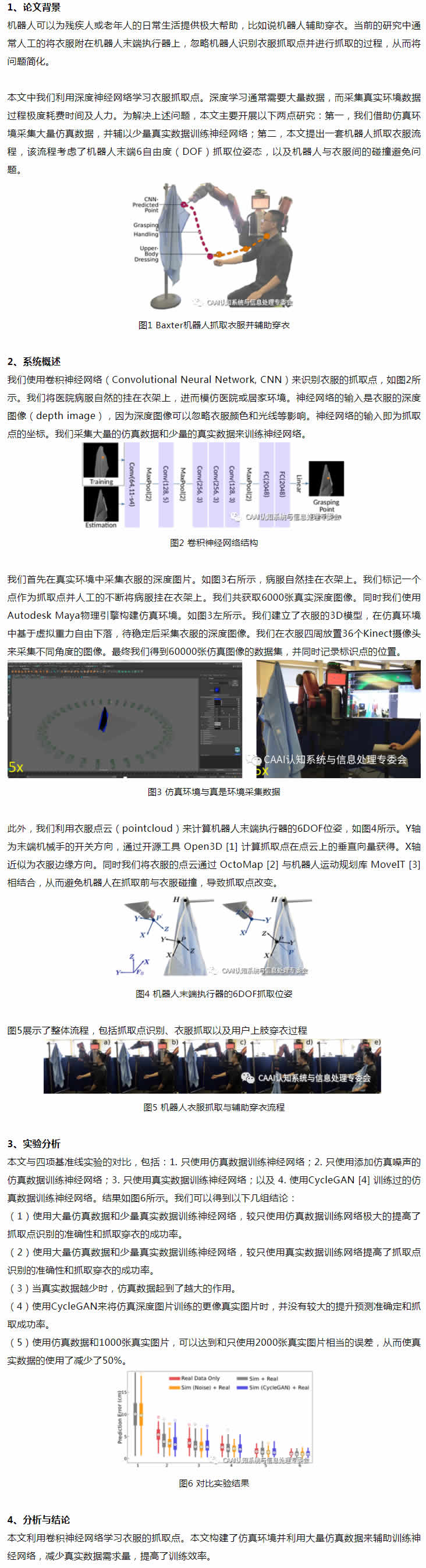
機器人可以為殘疾人或老年人的日常生活提供極大幫助,比如說機器人輔助穿衣。當前的研究中通常人工的將衣服附在機器人末端執行器上,忽略機器人識別衣服抓取點並進行抓取的過程,從而將問題簡化。
本文中我們利用深度神經網絡學習衣服抓取點。深度學習通常需要大量數據,而采集真實環境數據過程極度耗費時間及人力。為解決上述問題,本文主要開展以下兩點研究:第一,我們借助仿真環境采集大量仿真數據,並輔以少量真實數據訓練神經網絡;第二,本文提出一套機器人抓取衣服流程,該流程考慮了機器人末端6自由度(DOF)抓取位姿態,以及機器人與衣服間的碰撞避免問題。
基於行為序列的深度學習推薦模型搭配高性能的近似檢索算法可以實現既準又快的召回性能,如何利用這些豐富的反饋信息改進召回模型的性能
卡扣式裝配廣泛應用於多種產品類型的製造中,卡扣裝配是結構性的鎖定機製,通過一個機器學習框架將人類識別成功快速裝配的能力遷移到自主機器人裝配上。
羅晶博士和楊辰光教授團隊提出,遙操作機器人係統可以自然地與外界環境進行交互、編碼人機協作任務和生成任務模型,從而提升係統的類人化操作行為和智能化程度
專家(查紅彬,陳熙霖,盧湖川,劉燁斌,章國鋒)從計算機視覺發展曆程、現有研究局限性、未來研究方向以及視覺研究範式等多方麵展開了深入的探討
音樂科技、音樂人工智能與計算機聽覺以數字音樂和聲音為研究對象,是聲學、心理學、信號處理、人工智能、多媒體、音樂學及各行業領域知識相結合的重要交叉學科,具有重要的學術研究和產業開發價值
Adam 算法便以其卓越的性能風靡深度學習領域,該算法通常與同步隨機梯度技術相結合,采用數據並行的方式在多台機器上執行
人體姿態估計便是計算機視覺領域現有的熱點問題,其主要任務是讓機器自動地檢測場景中的人“在哪裏”和理解人在“幹什麼”
SIFT、PCA-SIFT、SURF 、ORB、 VJ 等目標檢測算法優缺點對比及使用場合比較
深度學習模型:OverFeat、R-CNN、SPP-Net、Fast、R-CNN、Faster、R-CNN、R-FCN、Mask、R-CNN、YOLO、SSD、YOLOv2、416、DSOD300、R-SSD
大型商用時序數據壓縮的特性,提出了一種新的算法,分享用深度強化學習進行數據壓縮的研究探索
滴滴機器學習場景下的 k8s 落地實踐與二次開發的技術實踐與經驗,包括平台穩定性、易用性、利用率、平台 k8s 版本升級與二次開發等內容
機器學習就是通過經驗來尋找它學習的模式,而人工智能是利用經驗來獲取知識和技能,並將這些知識應用於新的環境





