1、引言
腦卒中、意外事故和老齡化等造成的腦損傷患者數量大幅度增加,由腦損傷引起的手運動功能障礙直接影響患者的生活質量。傳統的治療手段主要依靠康複醫師輔助患者關節活動度和肌力訓練,但其訓練效果受醫生經驗和業務水平及訓練時間等因素的影響。因此有很多研究者研發了相關的康複訓練設備輔助患者訓練以重新獲取肢體的運動技能[1]。

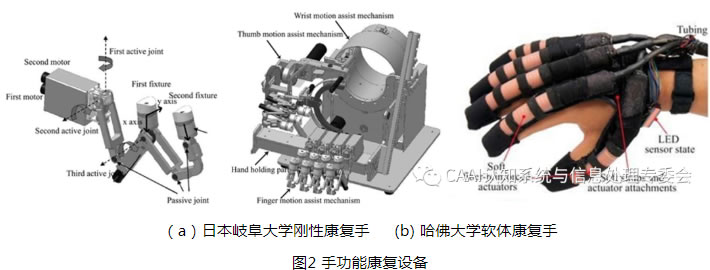
早期出現的手功能康複設備是剛性的,其剛度往往遠大於人手肌肉組織,在與人的交互過程中,對人手的適應性欠佳,雖然可以依靠傳感和控製實現安全交互,但技術難度高,係統成本較高,不利於推廣應用。而近幾年出現的軟體機械手充分利用和發揮各種柔性材料的柔順性,及其非線性、粘彈性和遲滯特性等在軟體手運動和控製中潛在的“機械智能”作用,降低控製的複雜度,實現高靈活性、強適應性和良好交互性,在醫療康複領域有重要應用價值[2]。
此外,臨床醫學也表明,患者主動參與康複訓練的效果要比被動康複顯著。目前,腦-機接口(Brain-Computer Interface,BCI)技術為患者主動康複訓練提供了一種新途徑,即在生物電信號與外部設備之間開辟了一條全新的信息交流通道以改善大腦皮層的可塑性並恢複受損神經功能或代替部分功能[3]。通過主被動康複訓練的互相配合,促進患者感覺運動環路的重建,使得主動康複訓練成為腦科學、生物醫學及康複工程、仿生學等領域最活躍的研究方向之一。
2、手部運動意圖識別方法
美國凱斯西儲大學Daly等通過運動想象檢測大腦皮層神經元的激活情況,表明BCI係統能有效地輔助患者誘發腦功能重塑並降低大腦皮層的異常激活。即主動的運動感知和被動外部設備相結合形成主被動康複訓練係統,將有利於受試者肢體的運動功能康複[4]。華盛頓大學Bundy等通過健側手部動作運動意圖輔助患者控製外骨骼機械手,實現了患者在日常生活中執行康複訓練[5],如圖3(a)所示。主被動康複訓練係統不僅能輔助正常受試者康複訓練,而且在患者的康複訓練中也取得了一定的進展。德國圖賓根大學VárkutiB等通過運動想象控製MIT-MANUS機器人輔助患者上肢執行康複訓練,結果表明上肢運動功能得到明顯改善[6]。如圖3(b)所示天津大學明東教授團隊通過患者肘關節屈-伸運動想象控製“神工一號”康複機器人輔助肘關節的康複運動,增強了康複訓練效果。西安交通大學徐光華教授團隊研究了目標誘導的運動想象刺激範式,證明了有目標導向的運動想象增強了對大腦皮層的激活並改善運動想象的能力[7]。韋恩州立大學Whyte等進一步提出了規範康複訓練體係可幫助患者主動參與康複訓練[8]。

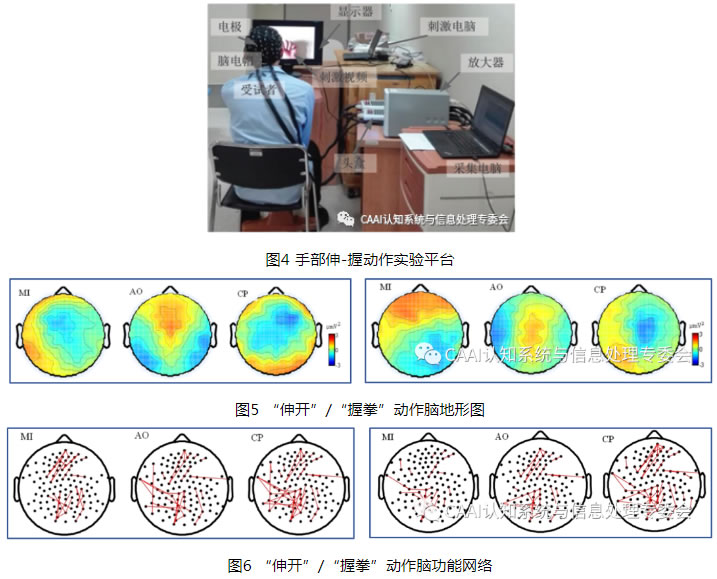
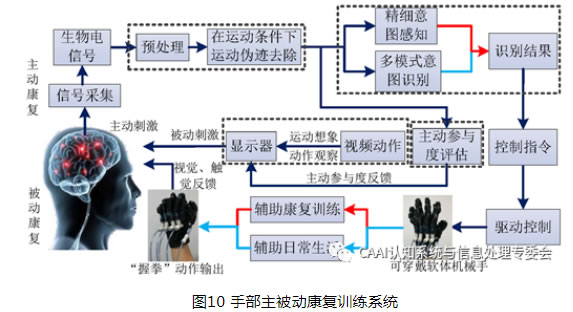
為了提高運動想象動作與所需要的康複肢體的直接相關性,本課題組設計了手部伸-握動作直接相關的運動想象和動作觀察相結合的複合範式實驗,以實現更好的手部主動康複。運動想象是讓受試者去想象某一個動作,不用產生任何肌肉活動,調動主觀意念在心理上反複模擬或複現相應動作。動作觀察是讓受試者觀看日常生活手的基本動作(如抹桌子、洗衣服等視頻動作),然後盡力去模仿視頻中所出現的動作。通過ERSP(時間相關譜擾動)、腦地形圖和腦功能網絡計算分析了伸-握動作運動想象和動作觀察對大腦皮層的激活規律。
實驗結果表明與伸-握動作直接相關的運動想象和動作觀察相結合的複合範式,增強了與伸-握動作直接相關大腦皮層的激活程度,發現了“伸開”動作對應能量和激活現象均大於“握拳”動作。將運動想象和動作觀察相結合可增強對大腦皮層的激活程度,有助於手部運動功能障礙的恢複。並且將實驗中不同範式下伸-握動作對大腦皮層的激活規律為基礎,提出基於小波變換和共空間模式提取伸-握動作EEG特征的算法,再通過線性判別分析對伸-握動作精細意圖進行識別[9]。
圖7 小波變換和共空間模式算法分析流程圖
3、軟體康複手套設計製作
現有的軟體康複手大多采用拉線驅動、液壓驅動和氣壓驅動。韓國首爾大學的HyunKi In等人[10]設計了如圖8(a)所示的一種拉線驅動的軟體康複手Exo-Glove,在柔性織物手套的指套手背側和手掌側鋪設繞性金屬絲,驅動電機拉動繞性金屬絲,即可輔助手指的完成屈曲和伸展動作,指捏力量為20N,掌握力量為40N,驅動控製係統與手套本體分離使手套僅重196g,最大可以抓握直徑76mm的物體。哈佛大學的Panagiotis等人[11]設計了如圖8(b)所示的一款重量為285g的輔助患者抓握的液壓驅動的軟體康複手,並配備了一個重量為3.3kg的液壓驅動控製便攜式腰包。該液壓軟體康複手的軟體驅動器,由纖維增強材料製作的成型彈性腔與約束線、限製層組合製作,在增壓時可完成屈曲、扭轉、伸長等運動,可以輔助手指完成主動屈曲運動和被動伸展運動。哈佛大學的Stacey Lyne等人[12]利用3D打印模具進行軟材料澆鑄製作氣動軟體驅動器,從而製作成如圖8(c)所示的重量約為160g的 PneuNet 軟體康複手。該氣動軟體驅動器在靠近手背側嵌入彈性模量大的限製層,使驅動氣腔在增壓時向彈性模型大的一側彎曲,實現輔助手指主動驅動運動,氣壓為0.45Mpa時指尖壓力為1.2N。

鑒於拉線式軟體康複手的驅動傳動係統較複雜、對手的壓迫感較強,液壓軟體康複手重量較大、有泄露汙染的風險,本課題組對重量更輕、成本更低、驅動控製較為簡單的氣動軟體康複手展開了研究。前期,本課題組利用限製層和纖維約束的單氣腔驅動器結構設計,並基於電容變化原理利用介電彈性材料製作柔性傳感器,設計了如圖9(a)所示的集成柔性傳感器的氣動軟體康複手,改變限製層方向,可以輔助人手分別實現主動伸展和主動屈曲運動,並檢測手指彎曲角度進行康複效果評估[13]。但是該氣動軟體康複手無法輔助人手實現拇指的內收/外展運動,也無法同時實現伸展/屈曲運動的雙向主動訓練。為此,本課題組又利用波紋管製作的正負氣壓驅動器製作了如圖9(b)所示的氣動軟體康複手。該氣動軟體康複手僅有149克,采用開放式手套,通過欠驅動可以輔助手指實現伸展/屈曲運動和拇指的內收/外展運動的主動訓練;配套的便攜式氣動箱體積小、重量輕,高級康複版氣動箱可調節六個輸出氣路的壓力和流量;實驗表明,伸展/屈曲驅動器在伸展時的最大作用力為4.6N,內收/外展驅動器在內收時最大作用力為8.1N。當前,該氣動軟體康複手的驅動器設計、控製設計仍在不斷地進行優化。

4、手部主被動康複訓練係統設計
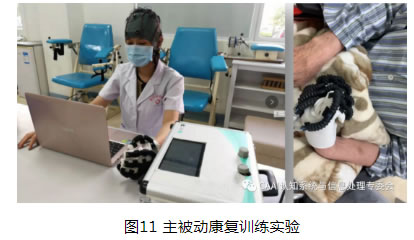
根據手部主被動訓練的康複需求,基於課題組在運動意圖識別、腦機接口、軟體手等方麵的研究基礎,設計了一種可康複訓練可日常生活輔助的穿戴式主被動康複訓練係統,係統的主要功能包括:多範式刺激、精細意圖感知、多模式意圖識別等[14]。
手部主被動訓練係統可分為主動康複和被動康複兩個部分。在主動康複訓練中,對於患者主動意圖的感知有兩種:一種是在多範式刺激大腦皮層的基礎上,從增強的EEG 中直接提取單側手部伸-握動作精細意圖的EEG 特征,實現對受試者手部動作的精細意圖感知;另一種是發揮不同模式如EEG、眼電圖(Electrooculogram,EOG)和肌電圖(Electromyogram, EMG)模式的優勢,構建多模式協同控製策略以產生更多的控製指令。在被動康複訓練中,通過主動運動意圖產生的控製指令或直接輸入指令對軟體康複手進行驅動控製,實現軟體康複手輔助手部執行康複訓練或進行日常生活。實驗驗證了係統輔助患者在線被動康複訓練,通過正常受試者在線控製康複機械手輔助執行伸-握動作,其平均正確率達到92.71%,基本滿足主被動康複訓練的要求,也提升了主被動康複係統的實用化水平。同時,該手部主被動康複訓練係統成功在多家醫院和兩家企業進行康複試用。
參考文獻:
[1] De V, Mulder T. Motor imagery and stroke rehabilitation: a criticaldiscussion[J]. Journal of Rehabilitation Medicine, 2007, 39(1):5–13.
[2] 張進華,王韜,洪軍,等.軟體機械手研究綜述[J].機械工程學報,2017,53(13):19-28.
[3] Schwartz A B. Cortical neural prosthetics[J]. Annual Review ofNeuroscience, 2004, 27(27):487–507.
[4] Daly J, Wolpaw J. Brain-computer interfaces in neurologicalrehabilitation[J]. Lancet Neurology, 2008, 7(11):1032–1043.
[5] Bundy D, Souders L, Baranyai K, et al. Contralesional brain–computerinterface control of a powered exoskeleton for motor recovery in chronic strokesurvivors[J]. Stroke, 2017, 48(7):1908–1915.
[6] Várkuti B, Guan C, Pan Y, et al. Resting state changes in functionalconnectivity correlate with movement recovery for BCI and robot-assistedupper-extremity training after stroke[J]. Neurorehabilitation and NeuralRepair, 2013, 27(1):53–62.
[7] Li L, Jing W, Xu G, et al. The study of object-oriented motor imagerybased on EEG suppression[J]. Plos One, 2015, 10(12):e0144256.
[8] Whyte J, Dijkers MP, Hart T, et al. The importance of voluntarybehavior in rehabilitation treatment and outcomes[J]. Archives of physicalmedicine and rehabilitation, 2019, 100(1):156–163.
[9] Zhang J, Wang B, Li T, et al. Non-invasive decodingof hand movements from electroencephalography based on a hierarchical linearregression model[J]. Review of Scientific Instruments, 2018, 89(8):084303.
[10]In H, Kang B B, Sin M K, et al.Exo-Glove: A Wearable Robot for the Hand with a Soft Tendon Routing System[J].IEEE Robotics & Automation Magazine, 2015, 22(1):97-105.
[11]Polygerinos P, Wang Z, GallowayK, et al. Soft robotic glove for combined assistance and at-homerehabilitation[J]. Robotics & Autonomous Systems, 2015, 73(C):135-143.
[12]Towards a soft pneumatic glovefor hand rehabilitation[C]// 2013 IEEE/RSJ International Conference onIntelligent Robots and Systems. IEEE, 2014.
[13]Jinhua Zhang, Hao Wang, Jiaqing Tang, Huaxia Guo, Jun Hong. Modelingand design of a soft pneumatic finger for hand rehabilitation[C] IEEEInternational Conference on Information and Automation. IEEE, 2015: 2460 –2465.
[14] Zhang J, Wang B, Zhang C, et al. An EEG/EMG/EOG based multimodalhuman-machine interface to real-time control of a soft robot hand[J]. Frontiersin Neurorobotics, 2019, 13:7.












