
| 創澤機器人 |
| CHUANGZE ROBOT |
在高精度的抓取和裝配工作中,僅僅依靠機械手本身的精度不能滿足任務要求。近期在IEEE TRANSACTIONS ON MECHATRONICS 上發表的一篇名為《A Survey of Methods and Strategies for High-Precision RoboticGrasping and Assembly Tasks—Some New Trends》的文章對近年來在機器人高精度抓取和裝配方麵的研究工作進行了分類、回顧和比較,並闡述了該領域的研究趨勢。
文章介紹了高精度機器人操控的五類方法:(1)基於傳感信息的方法(2)基於柔順機構的方法(3)基於環境約束的方法(4)基於感知約束集成的方法(5)仿生的方法。如圖1所示,示意圖展示了五類方法之間的差異。在機器人操控中,主體是機器人的手臂和手,客體是環境和被操控的對象。虛線表示傳感信息,回路表示傳感器感知到的最新狀態。
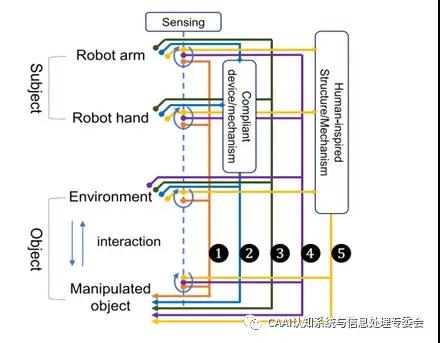
圖1 高精度機器人操控方法類型(1)基於傳感信息的方法(2)基於柔性機構的方法(3)基於環境約束的方法(4)基於感知約束集成的方法(5)仿生的方法
1、基於感知信息的高精度機器人操控方法
典型的用於機器人操控任務的傳感器主要包括視覺傳感器、距離傳感器和力/扭矩傳感器,如圖2所示。

圖2 應用在機器人操控任務中的典型傳感器(1)高速工業相機(2)智能工業攝像頭(3)激光距離傳感器(4)立體相機(5)結構光傳感器(6)飛行時間相機(7)關節扭矩傳感器(8)腕力/扭矩傳感器(9)手指壓力傳感器(10)手指觸覺陣列
1)視覺傳感器
首先,視覺傳感器可用於目標識別和姿態估計,許多計算機視覺算法被用於機器人操控[1]-[7]。其次,視覺傳感器可以用於測量和定位。根據雙目或多目視覺係統的視差原理,可以計算出目標物體的位置和方向。在[8]中開發了一種基於多功能立體視覺係統的立體視覺分割方法,它可以測量和跟蹤具有曲麵的物體的位置和方向[9]。在[10]中提出了一種用於已知目標三維姿態估計的視覺引導機器人係統,可以有效地抓取3-D目標。[11]中設計了一個高精度視覺伺服微裝配係統,該係統能夠做到微軸孔對準與軸孔裝配同時進行。研究人員利用視覺信息,提出了一種基於支持向量機(SVM)與主元分析(PCA)融合的區間估計優化算法,根據實驗數據[12]訓練機器人終端運動參數,規劃運動軌跡。
2)距離傳感器
距離傳感器可以感知目標點和傳感器之間的距離,采用如立體三角測量、光片三角測量、結構光、飛行時間、幹涉測量、編碼孔徑測量等方法獲取數據。
以下是機器人操控任務中常用的幾種距離傳感器:(1)激光測距傳感器可以快速準確地獲取傳感器與目標[13]之間的距離,主要缺點是成本高。(2)立體相機:使用兩台相機拍攝圖像,使用匹配算法或三角測量[14]-[17]計算距離。它的硬件複雜度適中,但計算複雜度較高且在弱光或圖像特征不清晰的情況下不能正常工作。(3)結構光傳感器,通過計算光的變形,向物體發射可控結構光,獲取目標參數。結構光的優點是獨立於場景,降低了匹配的難度。缺點是多個傳感器的相互幹擾,不能在強光下工作。(4)飛行時間相機,通過連續發送光脈衝,接收物體返回的光,記錄光的飛行時間,得到距離。與激光測距傳感器相似,這種傳感器具有良好的精度和魯棒性但部署成本高。
距離傳感器(圖2,圖片3-6所示)可以進行目標測量和姿態估計。在[18]中利用立體三角測量法實現了基於手眼立體相機的目標三維建模,並提出了一種分析方法來判斷給定對象在真實環境下的局部和全局可達性。
3)力傳感器
在機器人操控中,力/扭矩信息被廣泛用於消除零部件的微小位姿誤差。機器人操控中常用的力傳感器(圖2,圖片7-10所示),包括六軸力/扭矩傳感器和觸覺傳感器。前者通常安裝在機器人的關節和手腕上,通過剛性連接感知物體上的力或扭矩;後者主要安裝在機械手指尖或手掌上,用來感知對應機械部分的正壓力。
(1)關節扭矩傳感器:將傳感器安裝在機器人的關節上,獲取機器人運動時的扭矩信息。一方麵,利用關節扭矩來識別機器人與物體之間的接觸關係。另一方麵,關節扭矩信息常用於機械手的柔性控製。在[19]中提出了一種利用模糊推理機(FIM)進行裝配的方法,該方法可以根據裝配過程中的接觸信息快速推斷出當前的接觸狀態。研究人員設計了一種基於關節扭矩信息的柔性控製器,在關節機械阻抗未知的情況下調節末端執行器的柔性。[20]將主動柔度控製算法與被動柔度機製相融合,在基於肌腱驅動的機械手平台上實現了安全的人機交互。研究人員利用關節力矩信息設計了平衡前饋控製器,通過迭代學習控製[21]實現類人運動。
(2)腕力/扭矩傳感器:與關節扭矩傳感器類似,腕部傳感器既可用於確定機器人與物體之間的接觸狀態[22],也可用於確定機器人操控係統的慣性參數[23]。在[24]中提出了一種利用力或扭矩信息準確識別在位置/方位不確定條件下的接觸狀態的方法。[25]實現了一種基於力/扭矩傳感信息的準靜態分析方法。當機器人遇到較大的方向誤差時,該方法可以有效地調整力/扭矩。由於力/扭矩信息在裝配過程中是局部和瞬態的,研究力矩信息與其他全局信息如何融合在一起是一個很有價值的發展方向。如何平衡準確性和靈敏度之間的矛盾[26],以及如何實現各種接觸/非接觸狀態之間的有效切換[27]也是人們感興趣的問題。
(3)手掌和指尖觸覺傳感器:將觸覺傳感器安裝在手掌或手指的末端,獲取接觸力或壓力。它們通常用於接觸狀態識別[28],用於摩擦估計[29],或用於抓取過程中的滑移檢測[30]。為了解決抓取問題,研究人員對抓取接觸模型做了大量基礎性工作[31]-[33]。[34]-[36]中對機器人柔性手指抓取模型進行了一係列研究。研究者使用安裝在靈巧手上的接觸傳感器來高精度、高速地估計平麵物體的位置和方向。[37]設計了一種利用觸覺信息作為反饋來分析抓取成功率的算法。利用人工智能方法分析觸覺傳感器獲取的信息是一種趨勢。清華大學孫富春教授團隊提出的基於極限學習機(ELM)的觸覺感知識別方法[38]。此外,[39]使用監督學習方法,預測抓取過程中發生的滑移情況。[40]利用視覺信息和電子信息設計了一種觸覺傳感器的替代品,將循環神經網絡(RNN)和長短時記憶(LSTM)網絡相結合,來識別可變形和不可變形物體的變化模式。
2、基於柔性機構的高精度機器人操控
在機械工程中,柔性機構是通過彈性體的變形來傳遞或轉換運動、力或能量的柔性機構。使用柔順機構可以實現機器人手臂或手的被動柔性運動,從而允許在這種運動過程中消除裝配部件之間的位姿誤差。典型的裝置包括遠端柔性中心(RCC)和可變阻抗執行器(VIA)。
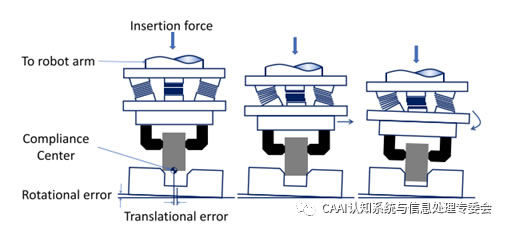
圖3 一般RCC的機械結構
(1)遠端柔性中心(RCC)
RCC是由Whitney和Nevins發明的,用於幫助機器人完成插入和裝配任務[41]。在他們的研究中,他們廣泛地討論了機器人的插入過程[42]。在插入過程中,銷釘會在軸向旋轉夾持器下傾斜,這稱為柔性中心。如圖3所示,RCC裝置實際上是一個有6個自由度的彈性機構,可以改變係統柔度中心的位置。在[43]中開發了一種具有計算機可調阻抗的主動柔性末端執行器。目前,將RCC與其他設備或控製方法相結合是非常有研究價值的課題。
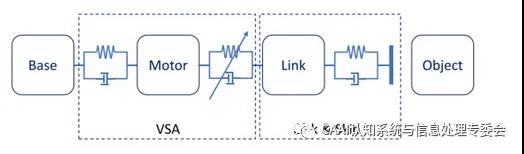
圖4 單自由度VSA與環境相互作用的質量模型
(2)可變剛度執行機構(VSA)
一種新型執行器VSA被引入實現與環境的柔性交互,如圖4所示。目前,[44]提出了一種利用VIAs進行軸孔裝配的低成本解決方案。[45]中提出了一種新的VSA設計,該設計考慮了在運動執行過程中改變傳動剛度的可能性,因此,在保持低傷害風險水平的同時,允許大幅度的運動加速。目前,許多使用VSAs代替剛度電機的機器人手臂和手的原型正在開發[46]-[48]。
VSA對於機器人抓取和裝配特別有用,它將執行柔性運動的能力整合到執行器中,這大大降低了設計帶有外力或扭矩傳感器的柔性控製器的難度。目前關於VSA的討論主要集中在如何達到給定目的的最優設計方案。
3、基於環境約束的高精度機器人操控
除了使用柔性機構來提供機器人高精度操控所需的柔度外,機器人與被操控對象之間還存在廣泛的約束條件,如配置約束和力約束。利用這些約束條件,特別是在給定係統中的傳感信息未知或部分未知的情況下可以為機器人設計一個有效的操控策略,典型的方法包括環境吸引區(ARIE)和籠型。
(1)環境吸引區
ARIE是環境形成的約束區域,存在於機器人係統的構型空間中。ARIE的概念最早在[49]中提出。[50]進一步討論了在生產中實現無傳感器高精度操控機器人的概念。通過利用構型空間中的環境約束,無需力傳感器即可在物理空間中進行高精度裝配(參見圖5)。
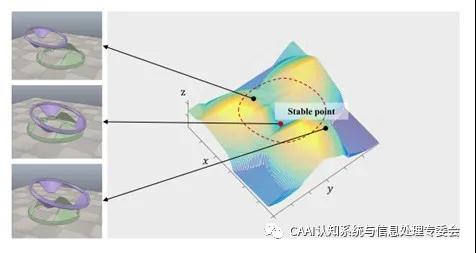
圖5 R3空間中的兩個複雜部分及其對應的ARIE
左:複雜零件的接觸狀態 右:ARIE中的相應點
基於該理論,目前完成了多個高精度的機器人操控任務。例如,在汽車製造業,利用基於ARIE的方法設計了一種偏心的無釘孔傳感器組裝係統[51]。研究人員還開發了一種基於視覺的三維抓取規劃方法,僅需要一張[52]圖像。在最近的研究中,[53]不僅討論了ARIE的定義和廣義條件,給出了ARIE的一般數學描述,分析了在不同構型空間中ARIE存在的條件,而且重點討論了高、低維空間中ARIE的關係。
(2)籠型
提出籠型問題是為了找到一組手指的放置點,該手指的放置可以防止多邊形任意移動遠離其給定位置[54]。籠形理論可以應用於機器人抓取領域。[55]研究了籠型構型與抓取構型之間的關係。[56]將抓握的工作擴展到了籠形,使用特征形狀來降低靈巧手的維度,還利用空間映射有效地測量了籠型的魯棒性。[57]-[59]提出了一種基於視覺的工業夾持器的籠型抓取算法。[60]結合了籠式抓取和強製閉合抓取的優點,使不同的抓取器能夠快速抓取未知的平麵物體。在[61]中提出了一種受繩索啟發的籠式抓握方法,可以保證局部穩定抓握。
4、基於感知約束集成的高精度機器人操控
從不同的空間將感知信息和環境約束集成到一個統一的框架中,引入環境約束區域(CRIE)概念。CRIE有兩個基本功能: 因為環境約束細化並揭示了一些狀態,它可以作為隱含傳感器來檢測係統的當前狀態;由於傳感信息利用了理想場景和真實場景之間的差異,因此它可以作為一個錯誤檢測器。[62]通過分析人手的解剖結構及其控製機製來探討機器人手的柔順性。[63]提出了一種具有環境約束區域的柔性機器人抓取策略,該策略可以根據近似的接觸力方向調整抓取構型。
除了將傳感信息與環境約束結合在一個空間之外,還可以采取傳感信息對環境約束(或環境約束對傳感信息)進行補償的方式。[64]提出了一種綜合抓取問題的解決方案,該方案在滿足所有必要約束條件的情況下,可以為特定的任務找到抓取給定對象的最優手構型。[65]研究了一種人手和人造手抓取和主動觸摸的建模方法。[66]研究了人類如何決定操控未知物體所需的抓取力,從而將人類抓取物體的策略應用到機器人係統中。
5、仿生的方法
人手的靈活性可以實現高精度的操作,因此研究人手的結構和控製機製可以改進現有機器人係統的設計,提高機器人操控的柔順性。文中提出了兩點:
(1)機器人末端執行器的耦合冗餘結構:目前,大多數機器人的手臂和手都采用了解耦控製,然而,手部運動是三維空間中各運動位置的疊加,運動誤差是各電機誤差的疊加。如果機器人的末端執行器能夠以適當的方式實現耦合和冗餘結構,則可以使運動更加柔順。 一些研究者設計了具有肌腱結構的新型機器人手,可以在未知環境下更好與目標進行交互。在[67]中提出了一個具有冗餘肌腱驅動和多邊約束的機器人操控係統建模的通用框架。在[68]中介紹了一種由肌腱驅動手指的仿生機器人手。在[69]中提出了一種基於肌腱驅動的機械手優化方法,該方法可以優化肌腱驅動結構的設計,以獲得最大的承載力。
(2)柔性控製策略:通過上述手臂和手的耦合冗餘結構,學習通過柔性控製策略實現高精度的操控。文中討論了兩種主要的控製策略。
策略1:係統需要大致了解手臂、手腕和手的精確程度。通過對手指的適當控製,對手臂和手腕的運動誤差進行補償。
策略2: 人類學習控製手主要是基於經驗。如果耦合冗餘結構在機械手上實現,可以利用深度神經網絡,通過強化學習和轉移學習來實現柔性控製策略。
6、總結
五類操控高精度機器人的方法及每種方法的特點如圖6所示。目前,對高精度機器人控製的研究仍集中在基於傳感器信息的方法上。力或扭矩信息在較低層次的控製方案實現中起著重要作用,基於視覺和距離的信息方法在較高層次的識別、測量和學習中發揮了重要的作用。一般來說,這些方法的精度主要取決於所用傳感器的精度,因此,對傳感器的改進有很多研究工作要做。
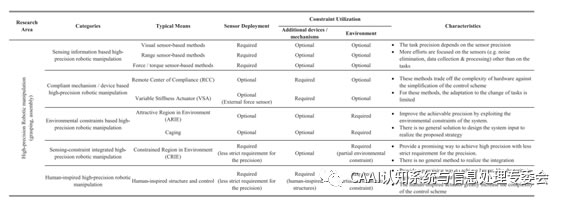
圖6 在利用傳感器和約束方麵每種方法的特點
基於柔性機構的方法是解決機器人高精度軸孔裝配問題的經典方式。RCC設備為標準的軸孔裝配任務提供了一種實用的解決方案,而VSA通過增強驅動機製,為實現柔順運動提供了另一種可能方式。用基於環境約束的方法來實現高精度機器人的控製是一種新思路。這種方法利用操控過程中的內在信息,避免了額外信息的幹擾。感知約束集成方法和仿生方法也提供了實現柔順靈巧操控係統的可能性,非常具有研究價值。未來在以下三個方麵仍有深入研究的價值,包括:用基於學習的操控方法,提高機器人係統的智能;用感知約束集成方法,減少機器人係統對高精度傳感信息的依賴;用仿生的方法,增強機器人係統的柔順性。
 |
| 機器人招商Disinfection Robot機器人公司機器人應用智能醫療物聯網機器人排名機器人企業機器人政策教育機器人迎賓機器人機器人開發獨角獸消毒機器人品牌消毒機器人合理用藥地圖 |


